服务热线< img border="0" src="http://wpa.qq.com/pa?p=2:2907815691:51" alt="免费在线咨询" title="免费在线咨询"/>
13636657709
服务热线< img border="0" src="http://wpa.qq.com/pa?p=2:2907815691:51" alt="免费在线咨询" title="免费在线咨询"/>
13636657709

DSM1-10 霍尔效应速度传感器专为行走作业机械的苛刻使用条件而开发。传感器能接收到铁磁性齿轮或切削板件的速度信号。作为有源传感器,在接收这些信号时,它会发出一个具有恒定振幅且不受速度影响的信号。传感器不但具有检测旋转方向的优越性能,而且还具有额外的诊断功能,例如:
由于其紧凑、高强度的设计,该传感器适合集成在
|
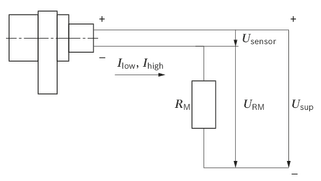
USensor |
传感器工作电压 |
|
Usup |
电源电压 |
|
URM |
测量电阻的信号电压 |
|
Ilow, Ihigh |
传感器电流 |
|
RM |
测量电阻 |
信号传递使用双线电流接口。传感器提供电流信号。低电流(Ilow = 有源元件自身的电流)转换为低信号。高电流(IHigh =Ilow+ ∆I;∆I = 来自与有源元件平行的路径的额外电流)转换为高电流。控制装置中接受到的来自测量电阻器的传感器 RM 测得的电流转换为电压信号。测定电路根据电压大小检测此信号是高信号还是低信号。
DSM1-10 输出信号由 DSM1-10 测定电子装置产生的具有恒定振幅的方波信号组成。单个脉冲的长度提供有关旋转方向的信息和有关安装位置的错误提示。
测定电子装置产生一个高脉冲,该脉冲具有确定的长度,位于传感器内部速度信号的各边之后,因此,该高脉冲的长度由待传输的信息决定。例如,左旋转方向信息由 90 µs 长脉冲描述,而右旋转方向信息则由 180 µs 长脉冲描述。
为确保在有高速长脉冲时仍能输出转速信息,应始终在高脉冲之前留出一段低时间(预置低位)。这样,虽在高速时丢失了信号内的附加信息(低时间功能会切断脉冲),但在最高频率下却能可靠地输出转速信息(上游低时间 + 最短高脉冲)。
如果输出气隙保留信号,其他信号会被覆盖(此时,AR 是主导信号),也就是说,旋转方向信号 (DR) 或安装位置信号 (IP) 都不会输出。
传感器对磁通量的变化做出反应。如果齿轮和传感器之间的气隙太大,则可能对信号输出产生不良影响:
极限量程限度通量改变
小于限度通量改变 针对磁流量变化,信号丢失可能会发生。
近程近值通量改变
小于近值通量改变 针对磁流量变化,输出 AR 位。
安装位置安装值通量改变
小于安装通量改变 针对磁流量变化,输出 IP 位。
转速增加时,在信号按计划长度输出之前检测到齿轮的下一个表面。在此类情况中,信号缩短并会被每个边之后的零时 (45 μs) 覆盖。这确保了脉冲频率和转速能始终得到正确传输。这样失去旋转方向信息并不重要,因为此时由于转速高而不会出现旋转方向变化。如果转速降低,(如减速直至旋转方向改变),信号会再次全部输出,并将检测到旋转方向的变化。
一秒钟内检测不到速度信号之后的
传感器信号:
当车辆停机时,传感器每 0.7 s 输出长度为 1.44 ms 的脉冲。只要未检测到速度信号,这些脉冲也会在欠电压后输出。
初始化也在停机状态下进行。初始化持续 255 至 345 µs。在此期间无法检测到信号变化。
退出停机状态和/或起动时的信号
在确定输出值(频率、旋转方向等)时,可能需要一定数量的脉冲以确保提供适当的信息。
当起步时或在欠电压状态之后,传感器先处于非校准状态(信号不进行偏移补偿)。同时在此阶段,传感器在第二个信号脉冲开始时提供一个正确的频率信号,此外,在典型条件下,传感器还会提供一个具有第三个信号脉冲的正确旋转方向信号。正确输出旋转方向最多需要七个齿/边,具体取决于安装位置。在此模式中,磁输入信号的最小值和最大值用作触发点。
在未校准模式下的信号输出期间,由传感器执行信号校准(偏移补偿)。随后,传感器会自动切换至已校准模式。从这一时刻起,将磁输入信号的零交叉点用作触发点。切换到已校准模式时,在极少数情况下,输出信号可能发生相移(最大值为 –90° 和/或 +90°)。
在未校准模式下输出的信号脉冲数量最多不超过五个。
信号公差
以下持续时间(最小值、标称值、最大值)由传感器内部组件在各种情况下的容差决定:
|
脉冲名称 |
脉冲宽度 t脉冲 |
||||
|
|
最小 |
标称 |
最大 |
||
|
预置位低 |
tVorbit |
μs |
37 |
45 |
53 |
|
气隙保留 |
tAR |
μs |
37 |
45 |
53 |
|
逆时针旋转方向 |
tDR-ccw |
μs |
74 |
90 |
106 |
|
顺时针旋转 |
tDR-cw |
μs |
149 |
180 |
211 |
|
逆时针旋转和安装位置信号1) |
tDR-ccw/IP |
μs |
298 |
360 |
422 |
|
顺时针和安装位置信号1) |
tDR-cw/IP |
μs |
597 |
720 |
843 |
|
停机 STOP |
tPuls-Stop |
μs |
1194 |
1440 |
1685 |
|
停机检测 |
tStop |
ms |
611 |
737 |
863 |
| 1) | 输出脉冲 DR-ccw/IP 和/或 DR-cw/IP 的最大信号频率大约为 117 Hz。高于此频率,此脉冲则由较短的 DR-ccw 和/或 DR-cw 更换。 |
振动
停机时,编码轮中的振动可能产生传感器假信号。
可使用以下 BODAS 控制装置读取 DSM1-10:21、22、30 和 31 RC 系列。
注意:
必须考虑所用的 BODAS RC 控制装置的电流样本。
2 路输入
2 inputs
5 路输入
6 路输入
6 路输入
电流 I 以脉冲形式提供传感器信息(详细信息参见“输出信号”一章),其低等级和高等级如下:
|
I |
最小 |
标称 |
最大 |
|
|
ILow |
mA |
5.9 |
7 |
8.4 |
|
IHigh |
mA |
11.8 |
14 |
16.8 |
最小脉冲宽度为 52 µs。这一宽度相当于 10 kHz 的频率。
要中断信号,必须确保在 30 kHz 的输入频率下,信号(经过存在的任何低通滤波器之后)仍然具有足够的电压差 (ΔV),以用于测定。
电阻器 R 会在 RC 控制装置进行频率输入时产生一个电压。
例如,当 R = 200 Ω 时会读到以下电压:
|
U输入 (R = 200 Ω) |
最小 |
标称 |
最大 |
|
|
ULow |
V |
1.18 |
1.4 |
1.68 |
|
UHigh |
V |
2.36 |
2.8 |
3.36 |
要安装的电阻器 R 必须根据以下原则进行选择:
如果这些条件均满足并且控制装置内部有信号,则可确定传感器的信息。
由于 DSM 可以检测到每个轮齿的两侧,实际的齿轮转速差通过以下公式确定
fWheels = fread / 2
为确定此信息,必须测量脉冲长度。例如,可通过在控制装置内测量脉冲的开始时间和结束时间来实现。
然而,转速始终可通过频率读取而无需测定。但应始终考虑到停机时的行为(1.44 ms/0.7 s)。可能检测到脉冲过长 (1.44 ms)。
|
01 |
02 |
03 |
|
|
DSM |
1 |
/ |
10 |
|
类型 |
||
|
01 |
霍尔速度传感器(行走机械应用) |
DSM |
|
型号 |
||
|
02 |
1 |
|
|
系列 |
||
|
03 |
10 |
|
|
类型 |
材料 号 |
|
DSM1-10 |
R917000301 |
|
类型 |
DSM1-10 |
||
|
公称电压 |
12 V |
||
|
工作电压 |
USensor |
4.5 V … 20.0 V |
|
|
最大输入电流 |
16.8 mA |
||
|
传感器电流 |
ILow |
7 mA ±20% |
|
|
IHigh |
14 mA ±20% |
||
|
信号比 I高 / I低 |
≥ 1.9 |
||
|
轮齿频率 |
至 |
5 kHz1) |
|
|
信号频率 |
(= 轮齿频率 x 2) |
至 |
10 kHz1) |
|
最大测量距离 |
典型 |
1.5 mm … 3 mm2) |
|
|
旋转方向信号 |
PWM 信号(请参阅“输出信号”一节) |
||
|
电磁兼容性 |
带状线 (ISO 11452-5) |
1 MHz … 400 MHz |
200 V/m |
|
自由场 (ISO 11452-2) |
200 MHz … 1 GHz |
150 V/m |
|
|
过电压保护 |
24 V, 10 x 5 min |
||
|
反极性强度 |
反极性电流 |
≤ 195 mA |
|
|
在控制单元中或外部提供相应的保护电路! |
|||
|
抗振性 (IEC 60068-2-34) |
振荡,噪音 |
0.05 g2/Hz |
|
|
抗冲击性 |
IEC 60068-2-27 |
1000 m/s2, 6 ms, 12 x 1000 x 各个方向(正/负) |
|
|
耐盐雾 |
DIN EN ISO 9227:2017 |
168 h |
|
|
防护类型 |
ISO/DIS 20653 Norm |
IP69K |
|
|
工作温度范围 |
传感器区域 |
-40 °C … 150 °C |
|
|
电缆区域 |
-40 °C … +115 °C |
||
|
存储温度范围 |
EN 60068-2-1 |
-40 °C … +115 °C |
|
|
材料 |
壳体:热稳定聚酰胺 |
||
|
线路:聚氨酯弹性体鞘绝缘 95 ±5 肖氏硬度 A |
|||
|
凹形插座:黄铜 |
|||
|
重量 |
55 g |
||
|
安装位置 |
请参阅“安装说明”一节 |
||
|
测量表面的油压阻力 |
5 bar |
||
|
ROHS |
符合 EU-RoHS2 |
||
| 1) | 大于 2500 Hz 的轮齿频率可影响到抖动阈值和电磁阈值。 |
| 2) | 最佳气隙主要取决于具体应用(磁场、齿轮材料等) |
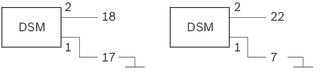
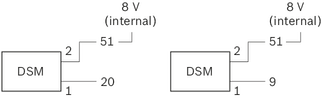
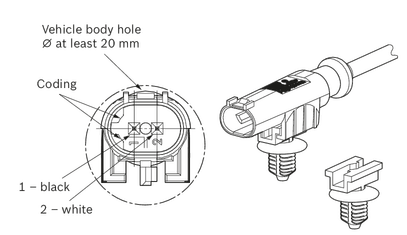
Pin Assignment: Plug
|
插脚 |
RC … /22 |
RC2-2/21 |
|
1 |
信号 |
接地 |
|
2 |
电源 |
信号 |
| 配对插头不在供货范围内。 | |
| 该部件可由博世力士乐按要求供货(请参阅“配件”一章) |
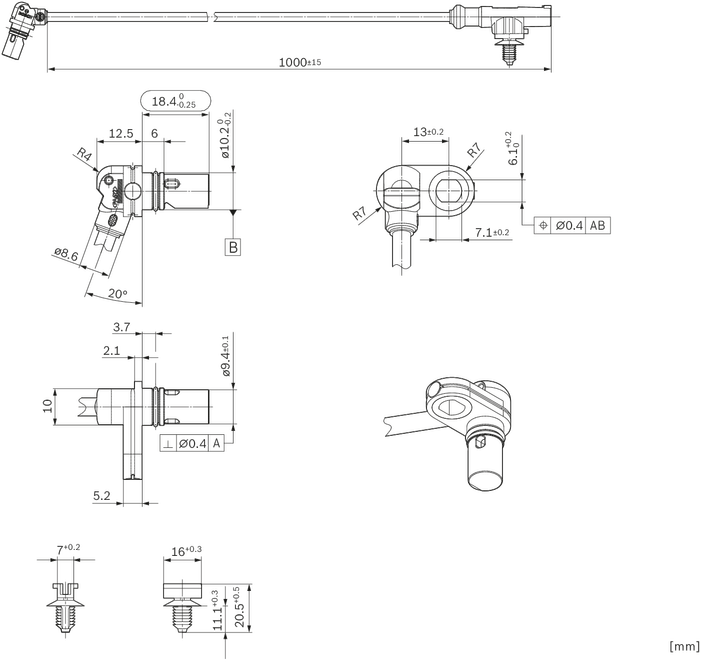
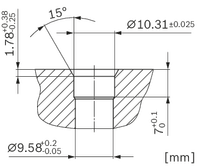
| 提供的连接器带有一个卡箍用于与主体固定。适用的板厚度范围为 0.7 至 6.0 mm 并且主体开口直径为 6.5 至 7.0 mm。 |
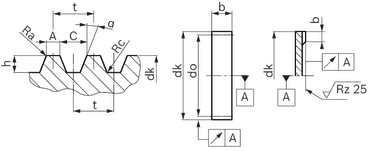
冲击轮必须导电。材料应为软磁性材料。迄今为止已经对易切削钢、热处理钢和烧结钢进行了测试(例如 St37、9SMn28、C45、GG20、GGG40、X8Cr17)。
|
|
|
公称压力 |
允许偏差 |
|
z |
基本齿数 48 |
|
|
|
t |
间距 |
> 4.1 mm |
|
|
tp |
单独间距偏差 |
|
±4% |
|
Tp |
总间距偏差 |
|
4% |
|
A/t |
齿尖宽度对间距的比率 |
60 mm … 120 mm, A/t = 0.4 … 0.5 |
±10% |
|
dk |
外径 |
> 60 mm |
±0.05 mm |
|
h |
齿高 |
> 2.5 mm |
±0.1 mm |
|
A |
齿尖宽度 |
通过 A/t 计算 |
10% |
|
b |
脉冲轮宽度 |
> 5 mm |
|
|
α |
压力角 |
0 … 20 |
±1 |
|
Ra |
齿尖半径 |
< 0.3 mm ( A = 2 mm) … < 0.6 mm ( A = 6 mm) |
|
|
Rc |
齿根半径 |
< 0.6 mm |
±0.2 mm |
|
|
齿形 |
矩形和梯形 |
其他达成协议的形状 |
该产品符合 ISO 13849-2: 2012 中适用且经过验证的基本安全要求。
就机械指令 2006/42/EC 而言,该组件并非安全部件,其开发依据为 ISO 13849-1:2015 和/或 ISO 13849-2:2012。
注意
所述 MTTFD值仅对传感器有效。在依据 ISO 13849-1.2015 对传感器的功能安全进行评估时,必须考虑到整个信号链。为此,若将传感器应用于液压驱动装置,还必须考虑到相应的运动性(如齿圈)。
MTTFD值依据 ISO 13849-1:2015 附录 D“部件计数法”,以及下方给出的温度曲线确定。
|
控制单元的环境温度 [°C] |
自加热 [°C] |
温度曲线,工作时间共享 [%] |
|||||||||||
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
10 |
15 |
1 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
30 |
15 |
2 |
2 |
2 |
2 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
40 |
15 |
3 |
3 |
3 |
3 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
50 |
15 |
4 |
3 |
3 |
3 |
1 |
100 |
0 |
0 |
0 |
0 |
0 |
0 |
|
60 |
15 |
5 |
3 |
3 |
3 |
1 |
0 |
100 |
0 |
0 |
0 |
0 |
0 |
|
70 |
15 |
6 |
3 |
3 |
3 |
1 |
0 |
0 |
100 |
0 |
0 |
0 |
0 |
|
80 |
15 |
79 |
85 |
3 |
3 |
1 |
0 |
0 |
0 |
100 |
0 |
0 |
0 |
|
90 |
15 |
0 |
0 |
82 |
3 |
1 |
0 |
0 |
0 |
0 |
100 |
0 |
0 |
|
100 |
15 |
0 |
0 |
0 |
79 |
92 |
0 |
0 |
0 |
0 |
0 |
100 |
0 |
|
110 |
15 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
100 |
|
MTTFD 工作期间的值 [年] |
4 小时/天 |
7240 |
7016 |
4660 |
3196 |
2876 |
20748 |
14340 |
9408 |
6332 |
4068 |
2700 |
1864 |
|
8 小时/天 |
4525 |
4385 |
2913 |
1998 |
1798 |
12968 |
8963 |
5880 |
3958 |
2543 |
1688 |
1165 |
|
|
16 小时/天 |
2588 |
2508 |
1666 |
1143 |
1028 |
7417 |
5127 |
3363 |
2264 |
1454 |
965 |
666 |
|
|
24 小时/天 |
1810 |
1754 |
1165 |
799 |
719 |
5187 |
3585 |
2352 |
1583 |
1017 |
675 |
466 |
|
|
章 |
经过多次试验证明的安全原则 (SP) |
备注 |
技术 |
使用领域 |
已在产品中实施 |
|
D.1.7 |
抑制电压峰值 |
应当为施加的负载并联使用抑制电压峰值的机构(RC 元件、二极管、压敏电阻),但不并联触点。 |
电气系统 |
组件 |
对于不受限的操作,更高级别的系统必须确保不超出 20 V 的电源电压。最多在 10 × 5 分钟内允许 24 V 的电压峰值。 |
|
D.1.12 |
在恢复供电之后,防止意外重新启动 |
避免意外启动,例如,供电恢复之后的意外启动 [参见 EN 292-2:1991 (ISO/TR 12100-2:1992) 的 3.7.2、EN 1037 (ISO 14118)、EN 60204-1 (IEC 60204-1)]。需要单独考虑特殊应用,例如为夹紧装置或固定某个位置而维持供电。 |
电气系统 |
组件 |
预期的启动行为: |
|
D.3.4 |
电能限制 |
将使用电容器来供应限量的电源,例如当使用时间周期控制时。 |
电气系统 |
组件 |
不符合组件要求。 16.8 mA 的最大电流水平和/或 20 V 的最大电压水平决定了组件必须藉由更高级别系统来保障/限制。 |
|
D.3.5 |
电气参数限制 |
限制电压、电流、能源或频率以避免不安全的状态,例如采用扭矩限制、偏移/有时间限制的运转以及减速。 |
电气系统 |
组件 |
不符合组件要求。 16.8 mA 的最大电流水平和/或 20 V 的最大电压水平决定了组件必须藉由更高级别系统来保障/限制。 |
|
D.3.8 |
故障时的状态切换 |
如果可行,所有机构/回路应当转变为安全状态或可安全地操作。 |
电气系统 |
组件 |
未对组件实施。更高级别的系统必须检测传感器出现故障的工作状况,并且必须确定和实施适当的补救措施。 |
|
D.3.9 |
定向故障 |
如果可行,应当使用故障类型已知的组件或系统 [参见 EN 292-2:1991 (ISO/TR 12100-.2:1992) 的 3.7.4]。 |
电气系统 |
系统 |
|
|
D.3.11 |
减少可能的故障/分离 |
将安全相关的功能与其他功能分离。 |
电气系统 |
组件 |
对于组件不相关,因为复杂的信号包含更多信息。更高级别的系统必须检测传感器出现故障的工作状况,并且必须确定和实施适当的补救措施。 |
|
由保护帽/壳体密封/触点保护/插座壳体组成的连接器壳体 |
套筒触头 AMP-No. |
管路剖面 [mm2] |
绝缘直径 [mm] |
单个的密封件 AMP-No. |
|
1-967644-1 |
965906-1 |
0.75 |
1.4 … 1.9 |
967067-1 |
|
962885-1 |
0.5 |
|||
|
0.35 |
0.9 … 1.4 |
967067-2 |
||
|
0.2 |
| 该配对插头可由博世力士乐按要求供货(Bosch Rexroth 材料编号 R917002704)。 |
